




System approach and technology
How expeditions are performed
Franck Goddio has developed a special system approach according to which every archaeological campaign is performed. The work begins with the study and critical review of archives and/or ancient texts, in order to determine and characterize probable locations of archaeological vestiges. With the help of non-intrusive cutting edge technology, such as a specially developed nuclear magnetic resonance magnetometer (NMR), multi-beam bathymetry, sidescan sonar, parametric sub-bottom profiler and satellite positioning system (DGPS) the site is mapped. Test excavations are then performed in order to characterize specific features seen on the electronic maps.
If the data gives some positive clues the actual full archaeological excavations begin, involving specific databases, archaeological inventory, drawings, mapping, photographing, filming, photogrammetric coverage and 3-D follow-up rendering of the excavation.
In accordance with UNESCO recommendations stated through the Convention for the Protection of Underwater Cultural Heritage artefacts are usually left on site, in coordination with the concerned authorities they may be risen for their safeguard, study and conservation. Afterwards, conservation and the cataloging of findings by specialists are implemented. Analysis of findings are then performed by experts who also participate in the publication of scientific results. Finally, Franck Goddio also tries to present findings to the public through international exhibitions and media work.
Mapping the site: Survey Technologies
Parametric Sub Bottom Profiler


Basically, this geophysical prospecting tool penetrates the layers of the underwater soil by an electro-acoustic wave emitted by a transducer. The analysis of the return of this wave gives information on the nature of the layers crossed. These systems, which have been used for many years in oil and mining exploration, have undergone recent fundamental changes.
The development of these new parametric or non-linear sediment probes has broadened the range of their applications, particularly in submerged archaeology, where water depths are often shallow and the resolution is fundamental. Based on a complex principle of transmitting 2 high primary frequencies generating a low secondary frequency by difference, these devices have the enormous advantage of presenting small transducers with a reduced emission lobe and therefore extremely directional, and therefore accurate.
Complex three-dimensional reconstruction software, combined with the performance of the latest computers, now allows us to develop accurate representations of the subsoil of the Bay of Alexandria, highlighting the ancient contours of the seabed and the wrecks and structures, construction remains, totally buried in the sediments.
Multi-beam Bathymetry and Echo Sounder
A precise bathymetric or relief map of the survey area is obtained using echo sounders or nowadays the multi-beam technique. These acoustic sensors deliver continuous depth measurements along the survey lines. This information can be stitched together to create a highly accurate relief map. Multibeam echo-sounder brings a fundamental centimetric bathymetry of the bottom and can reveal flush constructions or wrecks.


Sidescan Sonar

This sidescan sonar provides an image of the acoustic contrasts on the seabed, on a large band on each side of the survey boat. It reveals rocks and other objects lying on the seabed and can give an indication of their size by measuring the shadow, that they cast. Magnetometers can simultaneously determine whether these targets are magnetic or not. By juxtaposing geographically positioned bands of sonar information a complete coverage of the surveyed area can be created. Side scan sonar reveals images of objects with high contrast, such as uncovered statues.
NMR Magnetometer
Nuclear Magnetic Resonance (NMR) Magnetometers are the principal sensors in the surveying system. These highly sensitive instruments were developed by the French Atomic Energy Commission (CEA). Based on simultaneous proton and electron magnetic resonance (the Abragam-Overhauser effect), the NMR magnetometers measure the absolute value of the earth’s magnetic field more than one thousand times per second - with an accuracy of one fifty-millionth of its value. They are used to create highly sensitive magnetic maps of the seabed, which can provide vital clues about the location, orientation and size of potential buried archaeological features.



Electronic Maps
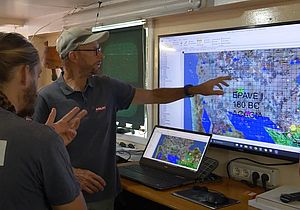
The survey vessel is equipped with computer systems for data acquisition and for graphically displaying the data from the geophysical sensors (bathymetric sub bottom profiler, magnetometers, multi-beams, sidescan sonar, etc.) together with the data from the sensors recording positioning and altitude (GPS, acoustic positioning, pressure sensors, heading, winch control parameters, etc.). Specialized software is then used to create maps from the survey results for analysis and interpretation.
Differential Global Positioning System (DGPS)

The GPS (Global Positioning System) is an absolute geographical positioning system that can provide the position in latitude, longitude and altitude of the mobile receiver, anywhere on the earth through information sent by a constellation of satellites. To get an accuracy of less than one metre, which is necessary in archaeological research, a GPS ground station is installed, which sends real time corrections by radio to the mobile receiver. The positions given by the mobile receiver after correction are then called differential positions. They can reach a centimetric precision.
Franck Goddio's team has also developed an original underwater DGPS to collect the position of the archaeological remains during excavations in shallow waters.
Acoustic Positioning System
The system, called ‘short base acoustic positioning’, is grounded on a regular time transmission of an acoustic signal from a transmitter - called a ‘pinger’ - which is mounted on a mobile unit to a receiving unit, fixed to the main survey vessel. As the position of the main vessel and receiver unit are precisely known from DGPS, the geographic location of the pinger can be calculated. It is possible to use several pingers at the same time.
Excavation Methods and Analysis
3D Photogrammetry
A full coverage of an excavation site can be achieved by taking hundreds of photographs with scales placed on the target. A visual reconnaissance computer’s program will assemble all the photographs in one single representation of the site.
If scales are put on the site in the 3 dimensions and if the pictures are systematically shot according to different angles (sometimes thousands of pictures), a program will enable a powerful computer to give a 3-D representation of the whole site. This technique can allow now to perform, in some cases, archaeological excavations without a physical grid set-up under water. The daily coverage of an excavation site will produce a 3-D follow-up of the work within centimetre accuracy.

RTI


Reflectance Transformation Imaging (RTI) is a photographic technique that is widely used in archaeology to record and study the surface detail of objects. It involves taking a series of photographs of the same object from a fixed camera position while changing the direction of the light source. These images are then combined using specialist software to create an interactive digital image in which the light source can be moved around the object’s surface. This is particularly useful for archaeological artefacts with worn, shallow, or difficult-to-see surface features as it creates shadows that can highlight minute surface details. We use it on items such as lead tokens, coins, inscriptions, seals, and other small finds that are often worn or eroded after being underwater but still preserve faint details that are hard to identify under normal lighting conditions. RTI allows these details to be enhanced by changing the virtual light direction, making decoration, lettering, and surface textures easier to examine.

In our work, we use a small hemispherical RTI dome fitted with LEDs positioned at different angles on its interior. The object is placed inside the dome and photographed repeatedly, with each image lit from a different LED position. In a typical capture, around 55 photographs are taken and combined into a single RTI file. This produces a highly detailed digital record that can be examined interactively. RTI is valuable in archaeology because it improves the visibility of surface detail without physically altering the object. It also creates a permanent digital image that can be studied remotely, shared with specialists, and revisited for future research.
Light Scanner
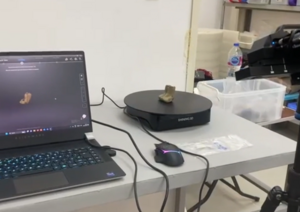

Another non-invasive method we use to document archaeological objects is 3D light scanning. This technique allows us to record the shape, surface, and fine details of an artefact without touching, altering, or damaging it.
During the process, the object is placed on a small rotating turntable connected to a scanner and computer. As the turntable moves, the scanner emits structured light onto the artefact from a range of angles. The scanning software records how this light falls across the surface, capturing the object’s form in great detail. These separate scans are then brought together in specialist software to produce a complete digital 3D model. The resulting model can be examined from all sides, measured, compared with other objects, and studied remotely by researchers who may not have access to the original artefact. It also provides a durable digital record, which is especially valuable for fragile, rare, or highly significant objects.
While photography remains an important and practical form of documentation, a photograph usually records an object from a fixed viewpoint in only two dimensions. A 3D scan, by contrast, captures the object as a form in space, preserving information about depth, curvature, surface irregularities, tool marks, wear, and damage in ways that photographs alone often cannot. For this reason, 3D light scanning has become an important part of modern archaeological recording: it supports research, conservation, teaching, public engagement, and long-term preservation.
The Grid Reference System

Traditionally, in archaeology the site is divided into 1 m by 1 m squares with the aid of ropes and cables. This system enables us to easily provide each object with a set of coordinates.
In underwater archaeology a baseline is first set out and firmly anchored to the seabed. Secondary lines can then be run at 90 degrees to the main baseline to create the grid. A planning frame can be used to help the diver accurately draw the remains in any 1 m by 1 m grid square. Today, however, this traditional method of drawing the site is being superseded by the use of electronic equipment, particularly DGPS. This type of underwater positioning systems can achieve a degree of precision within centimetres. The grid will be limited in the future to help the diver determine his own location on the site, particularly in cases of poor visibility.
Remote Operated Vehicle (ROV) and Deep Rovers

The remote operating vehicles (ROVs) are equipped with cameras and are able to perform surveys in deepwaters. One can follow the reconnaissance of the robot in real time in front of screens like a video game.
The small submersibles Jules and Jim, which were designed for research at great depths, were used by Franck Goddio for excavations. Capable of diving to a depth of 1,000 metres and carrying one passenger and one pilot, they were fitted with a camera and powerful searchlights. The Deep Rovers were equipped with multifunctional articulate robotic arms with a pincer on one side and a suction cup on the other which made it possible to pick up objects delicately. The plastic bubble in which the passengers travel is to be able to withstand pressure of the sea and to allow a 320° panoramic view. Each dive could last up to 8 hours.
Water Dredge

The water dredge is an underwater suction device that is used in excavation underwater to remove sediment. The light plastic dredge is supplied with water under pressure by a motor pump situated either at the surface or through a submersed electric pump as developed by Franck Goddio in 1992 during the San Diego excavation. A fine mesh screen at the mouth of the dredge serves to collect any small artefacts, which the diver may have missed.
Labelling

Every diver is supplied with nylon nets or plastic bags, to which a label with the excavation code is attached. Every item recovered is placed in its individual net and the position of the object in terms of latitude, longitude and altitude, its azimuth (compass orientation), and the angle of the object from the vertical, as well as the diver’s identifying mark is added.
Wood/Soil Analysis

In order to obtain the maximum possible information from a site samples are taken and analysed: for instance of organic remains like soil or wood etc. Soil analyses can give valuable information on the flora and fauna of the time, wood species analysis of boat timbers can perhaps indicate where the vessel was constructed and organic materials can also be scientifically dated using Carbon 14 analyses.
Coring
Coring programmes are conducted to collect subsurface sedimentary layers. The samples are obtained by drilling cylindrical sections in the seafloor with aluminium tubes. The gathered material (sediments, rock fragments, botanical and faunal material, etc.) is analysed for composition, physical structures, disturbance of sections and colour and organic materials from within the cores can be used for radiocarbon dating. Cores help answer questions of cultural history timelines, gradual land subsidence, sudden substrate failure, sea level rise, climate change and thus help to improve the excavation strategy.


Moulding

The moulding technique allows us to make imprints of artefacts discovered, and thus enables scientific experts to be quickly provided with new information for analysis. In locations where it is not possible to raise artefacts, moulding can be used to record objects in situ.
In order to take a surface impression of an object, underwater or on land, the stamping methods is applied. This technique is usually used for huge stone blocks on which inscriptions have been engraved. A special flexible silicone has been developed to make underwater impressions of engraved objects. After cleaning the object, the silicone is attached to it to coat the artefact. The layer is then covered with a sheet of lead, which is gently hammered in order to ensure that the silicone moulds into the smallest crevices. Once the silicone has transformed into a flexible membrane, usually after 16 to 24 hours, the inscriptions appear in reverse on the silicone and can be studied in detail on land.
Naval Architecture
After clearing a wreck a thorough study of the naval architecture of the boat is undertaken. It allows us to understand how ships or junks were built and how they operated at sea. The analysis of the naval architecture of the wrecks of junks discovered in the Philippines or of the indigenous Egyptian boats from Thonis-Heracleion is helping to overcome the lack of ancient sources about such vessels and opens up a broad range of questions about their construction and evolution over time.

Raising Artefacts
In accordance with UNESCO recommendations, artefacts are usually left on site, in coordination with the concerned authorities some may be risen for their safeguard, study and conservation. The support vessel of the excavation is equipped with a hoist to raise artefacts to the surface. At first the artefacts are carefully places in nets, each individually labelled, then in plastic baskets. Heavier objects (like statues or steles) are moved by means of a special balloon or crane.
For a project a special elevator was designed, which had to be anchored at a depths of 350 metres. The large support buoy of the elevator consisted of sixty spherical buoys, each of them capable of resisting a pressure of 100 atmospheres. A metal-platform was laid on the sea-bed to support the two-ton lead counterweight needed to operate the elevator. The lead weight – in four pieces of half-ton pins – was attached to a balloon to make it weightless and placed in position by a submersible. The elevator was operated by a submersible and raised objects – like the ship’s bell - to the surface with the greatest of care.





Conservation
Once an object reaches the surface, it is immediately cleaned in seawater, the date of discovery is entered on the label, and it is placed into a desalination tank. The tank is filled with 50% seawater and 50% fresh water, in order to avoid deterioration due to violent osmosis. After a couple of days it is placed in fresh water, which is continuously renewed. The salinity of the bath is constantly measured in order to determine when the object can be dried without damage. On land, a more complex desalination process is executed, using distilled water. Organic materials are kept in a damp environment on board, and are treated on land. After the desalination process, the object is described, measured and inventoried. Pottery is cleaned using microburins and scalpels to remove deposits and shells. Once the underwater sediments have been cleared, the object is carefully studied in reference to shape, texture and decoration in order to determine its date and provenance. Organic material requires swift and delicate treatment as soon as it has been recovered.
After desalination, the material is dried out slowly and excess water is gradually replaced by a resin, so that the volume of the material is maintained. Metals like bronze, silver, iron and lead corrode underwater. They are bathed in a regulated and precise system of chemical or electrochemical treatments. Conservation takes place chemically and ultrasonically. The revived objects can then, be chemically stabilized and covered with a protective layer.



